Guided Batching: a method for building city-scale HD maps from limited field-of-view cameras
Abstract
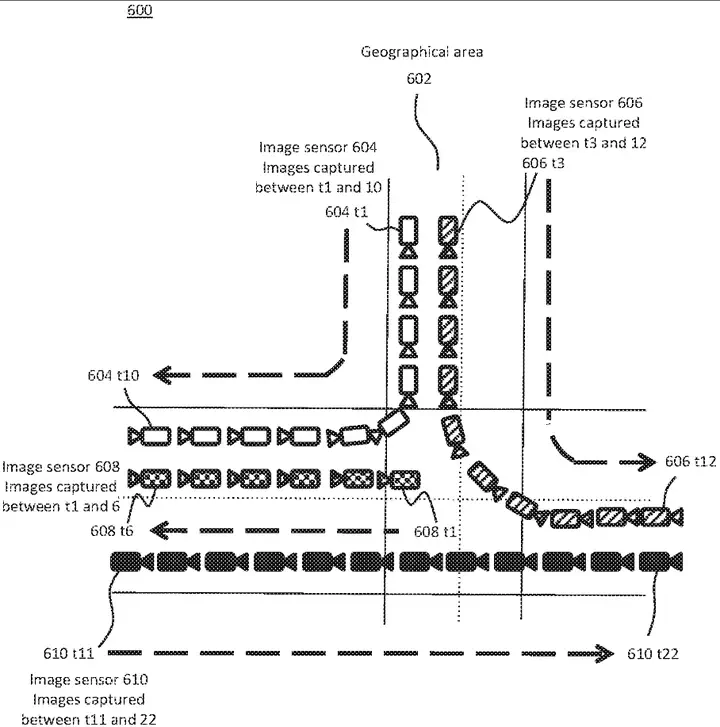
The present invention provides a method of generating a robust global map using a plurality of limited field-of-view cameras to capture an environment. Provided is a method for generating a three-dimensional map comprising: receiving a plurality of sequential image data wherein each of the plurality of sequential image data comprises a plurality of sequential images, further wherein the plurality of sequential images is obtained by a plurality of limited field-of-view image sensors; determining a pose of each of the plurality of sequential images of each of the plurality of sequential image data; determining one or more overlapping poses using the determined poses of the sequential image data; selecting at least one set of images from the plurality of sequential images wherein each set of images are determined to have overlapping poses; and constructing one or more map portions derived from each of the at least one set of images.